I enjoy making things. Here are a selection of projects that I have worked on over the years.
A single-camera stereo omnidirectional system (SOS) is applied for estimating egomotion in real-world environments.
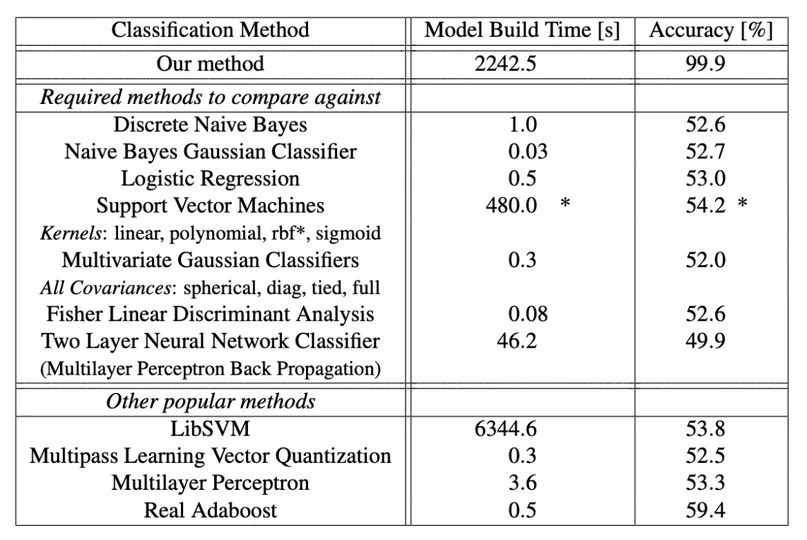
Project for Prof. Robert Haralick's Machine Learning Course at CUNY Graduate Center. The goal was to design a labeled two class data set of 10-dimensional vectors that has test set classification accuracy less than 60% on some popular classifiers. However, our decision rule was designed such that it can perform with greater than 90% accuracy on the test set.
In 2011, a new intelligent ground vehicle CATA (City Autonomous Transportation Agent) was rebuilt to employ the ROS framework to participate in IGVC.
In 2010, our intelligent ground vehicle CityALIEN participated and won the IGVC Design Challenge.
As part of my Research Experience for Undergraduates, I developed a Player/Stage driver and remote controller for the mobile robot.