Machine Learning Project - Multidimensional Classification using LUTs
Dec 23, 2014
·
0 min read
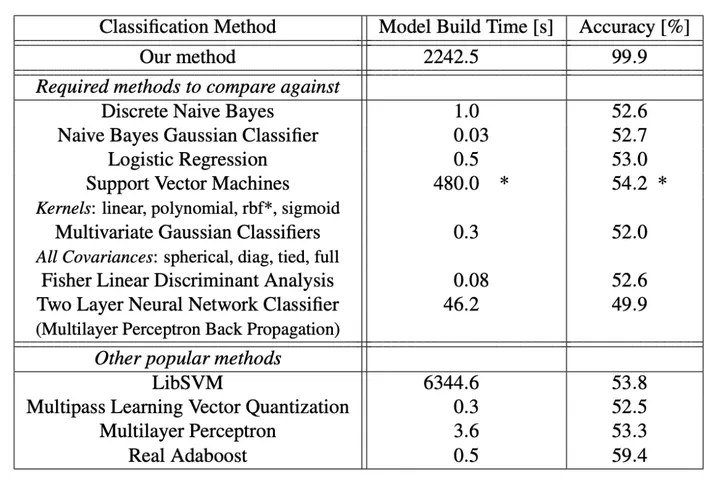 Comparison of the performance of popular classifiers in our data set
Comparison of the performance of popular classifiers in our data set