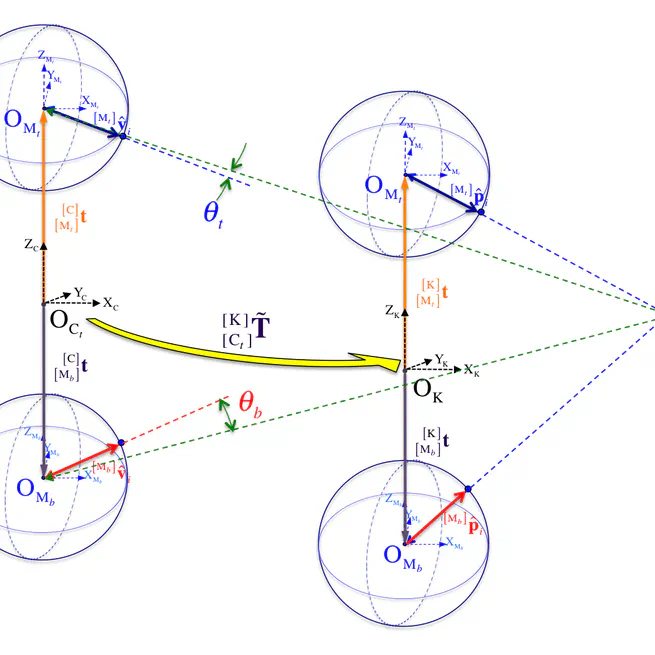
Visual Odometry with a Single-Camera Stereo Omnidirectional System
We present the advantages of a single-camera stereo omnidirectional system (SOS) in estimating egomotion in real-world environments.
Oct 1, 2019
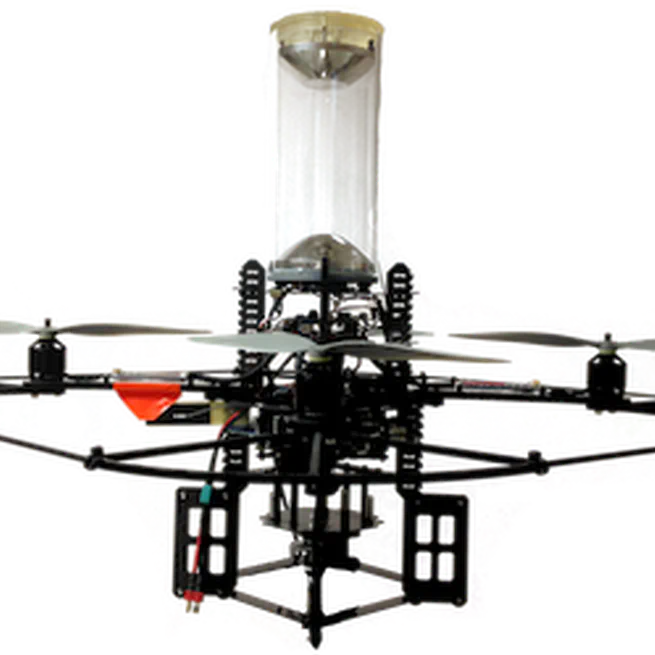
Design and Analysis of a Single-Camera Omnistereo Sensor for Quadrotor Micro Aerial Vehicles (MAVs)
We describe the design and 3D sensing performance of an omnidirectional stereo (omnistereo) vision system applied to Micro Aerial Vehicles (MAVs).
Feb 6, 2016
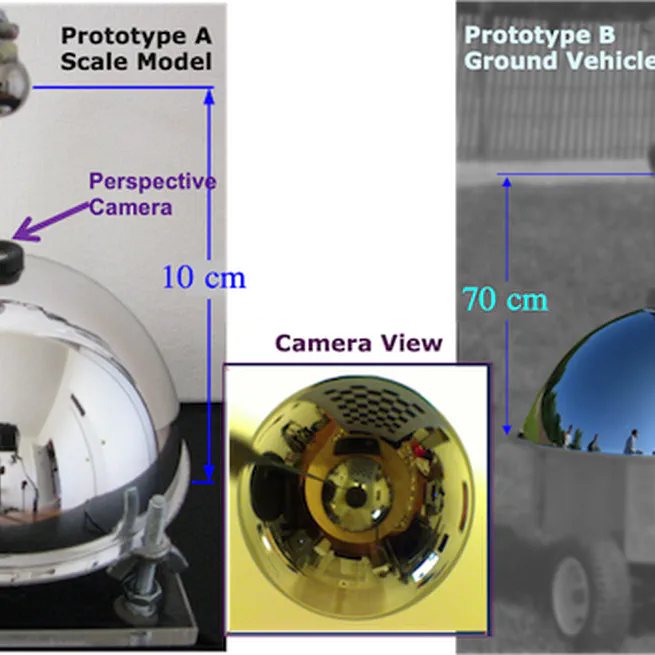
Generating near-spherical range panoramas by fusing optical flow and stereo from a single-camera folded catadioptric rig
We design a novel 'folded' spherical catadioptric rig (formed by two coaxially-aligned spherical mirrors of distinct radii and a single perspective camera) to recover near-spherical range panoramas.
Jan 1, 2013