
Enhancing 3D Visual Odometry with Single-Camera Stereo Omnidirectional Systems
We explore low-cost solutions for efficiently improving the 3D pose estimation problem of a single omnidirectional camera moving in an unfamiliar environment.
May 23, 2018
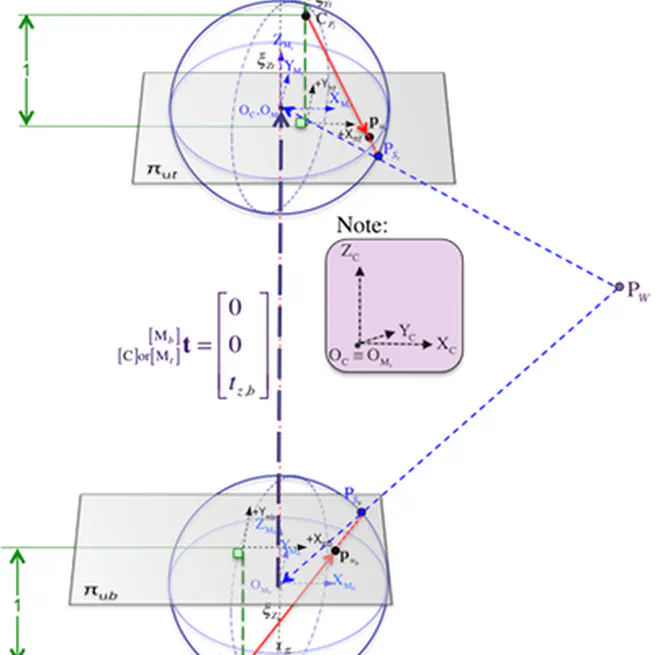
GUMS: A Generalized Unified Model for Stereo Omnidirectional Vision (Demonstrated Via a Folded Catadioptric System)
GUMS is a complete projection model for omnidirectional stereo vision systems. GUMS is based on the existing generalized unified model (GUM), which we extend for fixed baseline sensors.
Oct 9, 2016