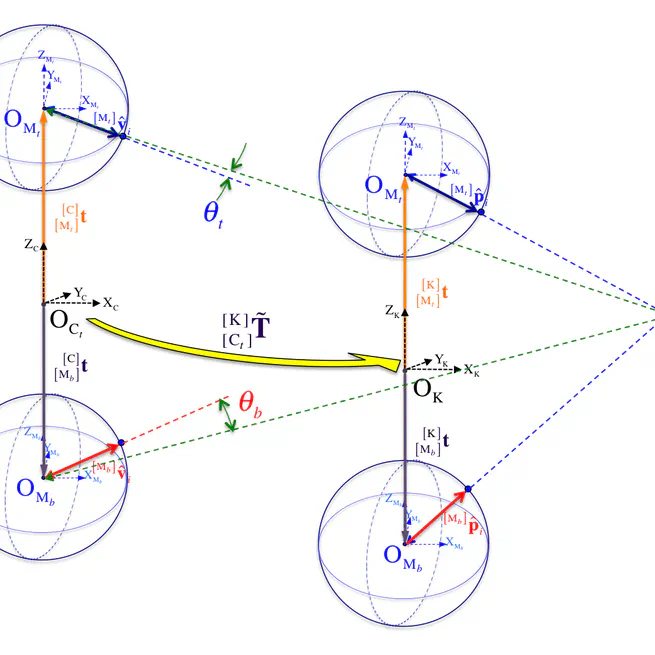
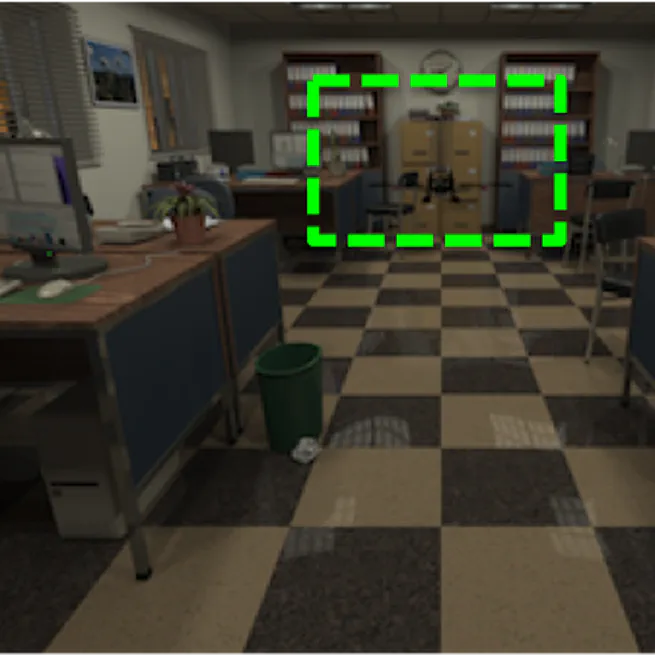
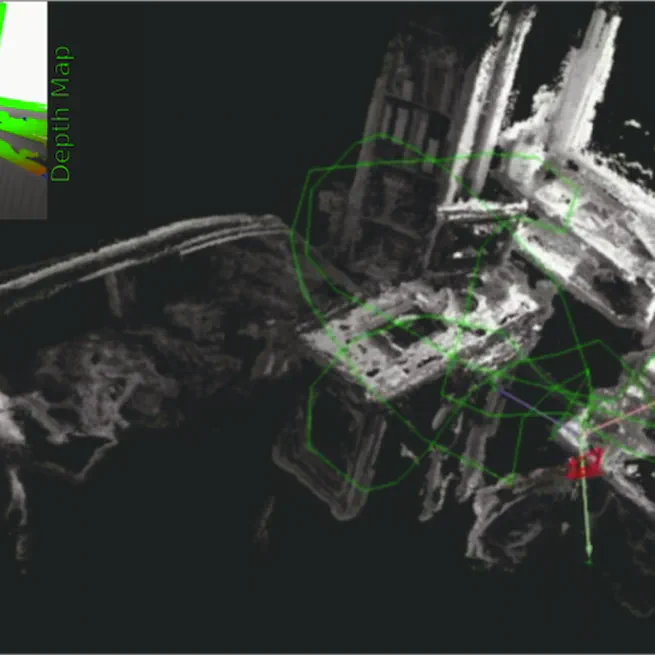
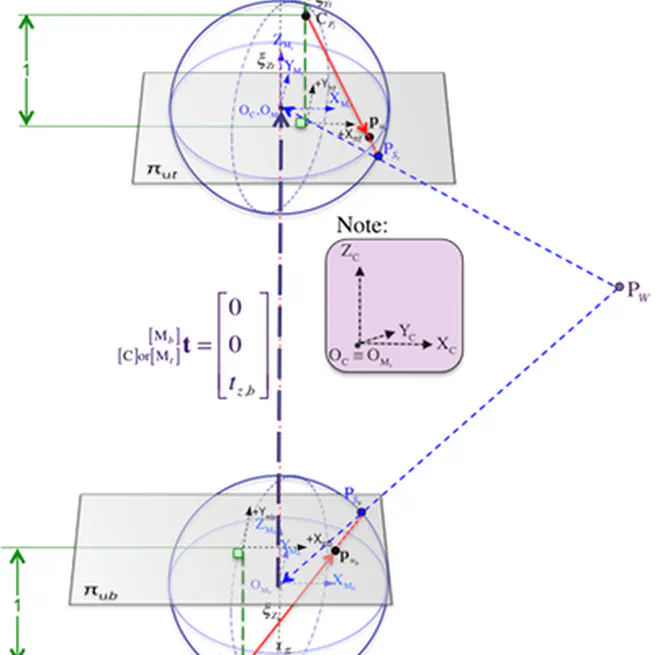
Visual Odometry with a Single-Camera Stereo Omnidirectional System
We present the advantages of a single-camera stereo omnidirectional system (SOS) in estimating egomotion in real-world environments.
Oct 1, 2019
Visual Odometry with a Single-Camera Stereo Omnidirectional System
A single-camera stereo omnidirectional system (SOS) is applied for estimating egomotion in real-world environments.
Oct 1, 2019

Enhancing 3D Visual Odometry with Single-Camera Stereo Omnidirectional Systems
We explore low-cost solutions for efficiently improving the 3D pose estimation problem of a single omnidirectional camera moving in an unfamiliar environment.
May 23, 2018
Direct Multichannel Tracking
We present direct multichannel tracking, an algorithm for tracking the pose of a monocular camera (visual odometry) using high-dimensional features in a direct image alignment framework.
May 25, 2017
GUMS: A Generalized Unified Model for Stereo Omnidirectional Vision (Demonstrated Via a Folded Catadioptric System)
GUMS is a complete projection model for omnidirectional stereo vision systems. GUMS is based on the existing generalized unified model (GUM), which we extend for fixed baseline sensors.
Oct 9, 2016
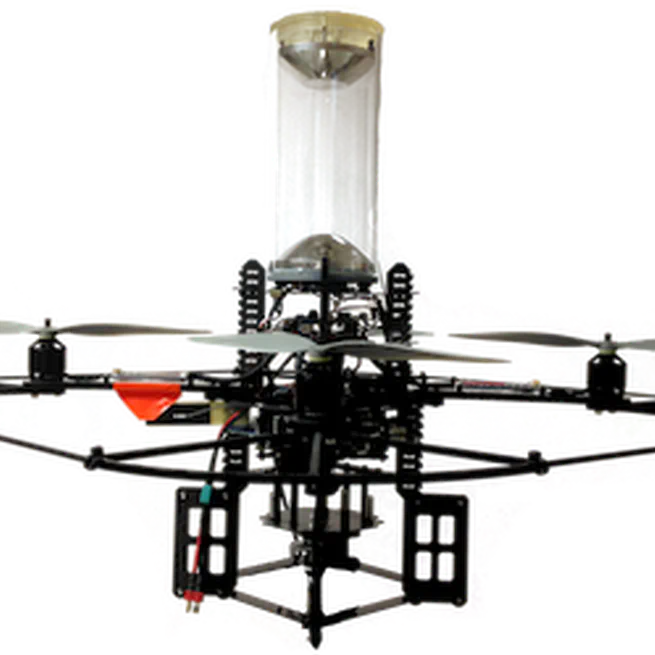
Design and Analysis of a Single-Camera Omnistereo Sensor for Quadrotor Micro Aerial Vehicles (MAVs)
We describe the design and 3D sensing performance of an omnidirectional stereo (omnistereo) vision system applied to Micro Aerial Vehicles (MAVs).
Feb 6, 2016

Autonomous Quadrotor Flight Using Onboard RGB-D Visual Odometry
We present an on-board navigation system for Micro Aerial Vehicles (MAV) based on information provided by a visual odometry algorithm processing data from an RGB-D camera.
May 31, 2014
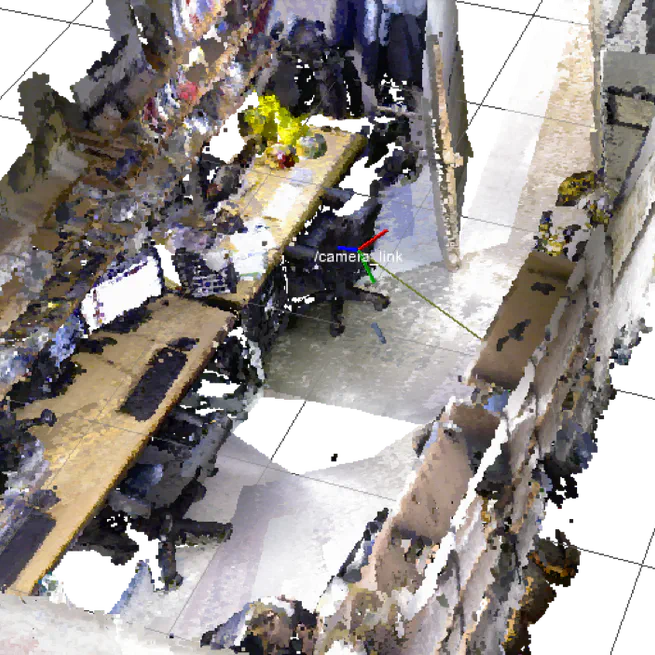
A 6-degree-of-freedom (6-DoF) pose localization method for a monocular camera in a 3D point-cloud dense map prebuilt by an RGB-D sensor.
A 6-degree-of-freedom (6-DoF) pose localization method for a monocular camera in a 3D point-cloud dense map prebuilt by an RGB-D sensor.
Dec 12, 2013

A Single-Camera Omni-Stereo Vision System for 3D Perception of Micro Aerial Vehicles (MAVs)
We introduce a catadioptric single-camera omnistereo vision system that uses a pair of custom-designed mirrors (in a folded configuration) satisfying the single view point (SVP) property as a good solution to the perception challenge of MAVs.
Jun 19, 2013
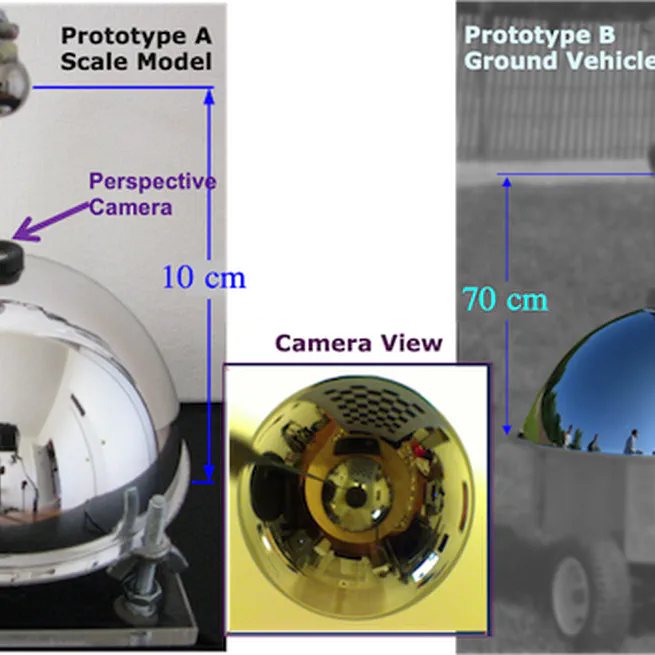
Generating near-spherical range panoramas by fusing optical flow and stereo from a single-camera folded catadioptric rig
We design a novel 'folded' spherical catadioptric rig (formed by two coaxially-aligned spherical mirrors of distinct radii and a single perspective camera) to recover near-spherical range panoramas.
Jan 1, 2013