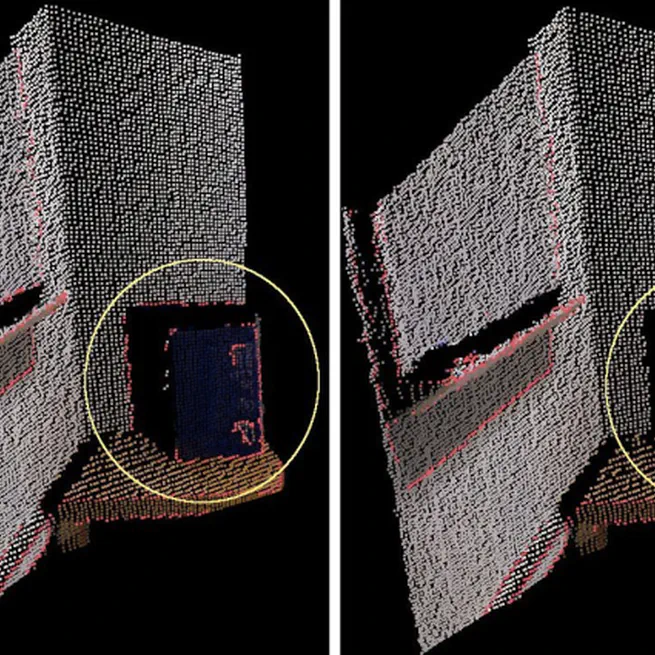
Incremental Registration of RGB-D Images
We present a real-time technique for 6-DoF camera pose estimation through the incremental registration of RGB-D images.
May 14, 2012

CATA
In 2011, a new intelligent ground vehicle CATA (City Autonomous Transportation Agent) was rebuilt to employ the ROS framework to participate in IGVC.
Jun 4, 2011
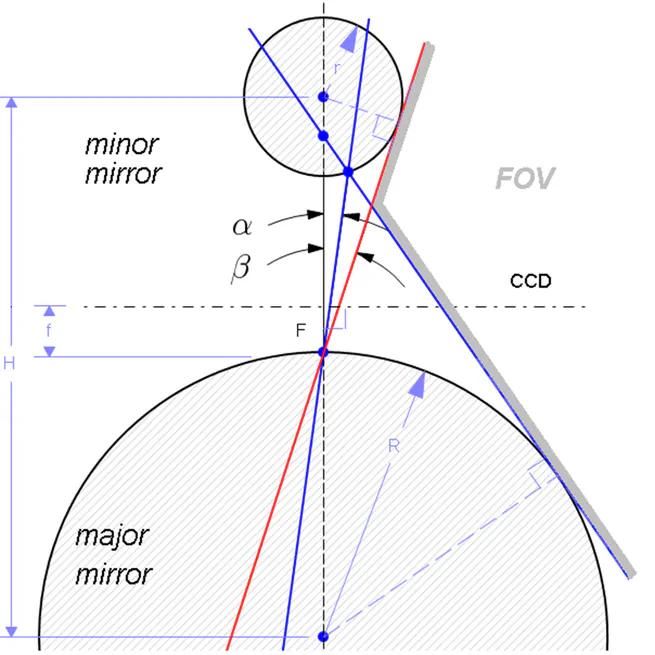
Fusing Optical Flow and Stereo in a Spherical Depth Panorama Using a Single-Camera Folded Catadioptric Rig
We design a novel 'folded' spherical catadioptric rig (formed by two coaxially-aligned spherical mirrors of distinct radii and a single perspective camera) to recover near-spherical range panoramas.
May 9, 2011

CityALIEN
In 2010, our intelligent ground vehicle CityALIEN participated and won the IGVC Design Challenge.
Jun 4, 2010