
CATA
In 2011, a new intelligent ground vehicle CATA (City Autonomous Transportation Agent) was rebuilt to employ the ROS framework to participate in IGVC.
Jun 4, 2011

CityALIEN
In 2010, our intelligent ground vehicle CityALIEN participated and won the IGVC Design Challenge.
Jun 4, 2010
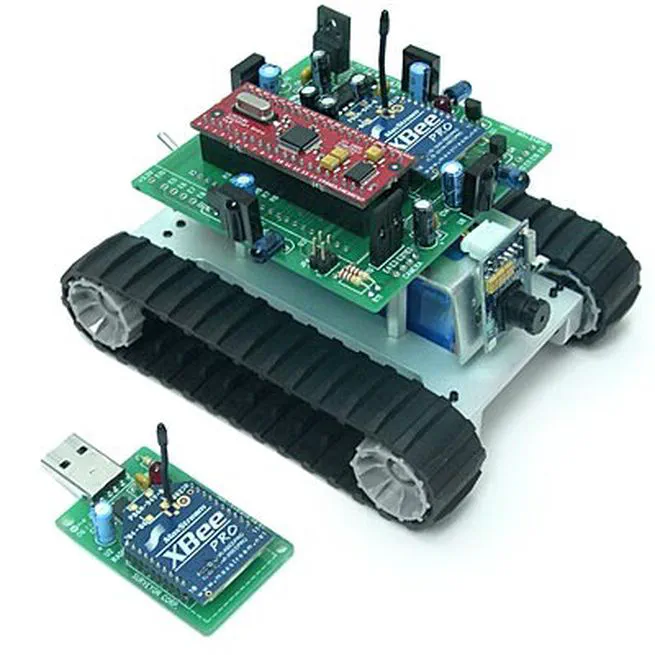
Surveyor SRV-1 Driver and GUI Remote Control
As part of my Research Experience for Undergraduates, I developed a Player/Stage driver and remote controller for the mobile robot.
Sep 1, 2009