Visual Odometry with a Single-Camera Stereo Omnidirectional System
A single-camera stereo omnidirectional system (SOS) is applied for estimating egomotion in real-world environments.
Oct 1, 2019

Enhancing 3D Visual Odometry with Single-Camera Stereo Omnidirectional Systems
We explore low-cost solutions for efficiently improving the 3D pose estimation problem of a single omnidirectional camera moving in an unfamiliar environment.
May 23, 2018
Direct Multichannel Tracking
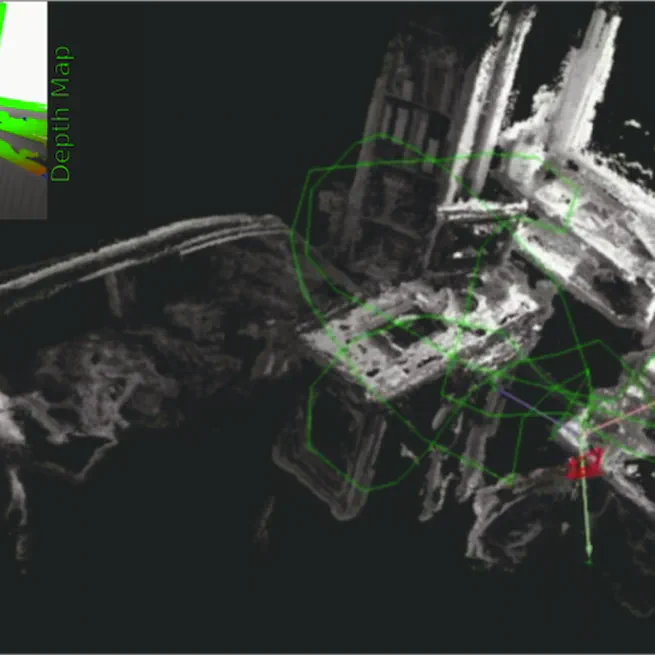
We present direct multichannel tracking, an algorithm for tracking the pose of a monocular camera (visual odometry) using high-dimensional features in a direct image alignment framework.
May 25, 2017

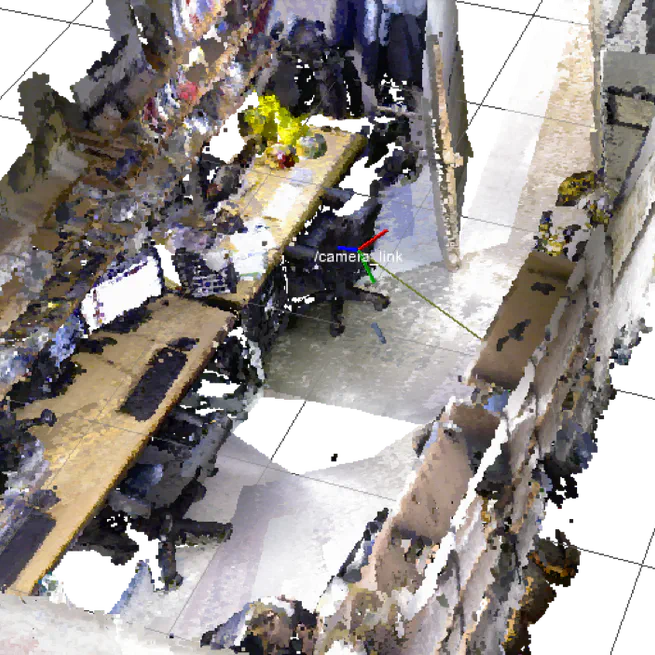
Autonomous Quadrotor Flight Using Onboard RGB-D Visual Odometry
We present an on-board navigation system for Micro Aerial Vehicles (MAV) based on information provided by a visual odometry algorithm processing data from an RGB-D camera.
May 31, 2014
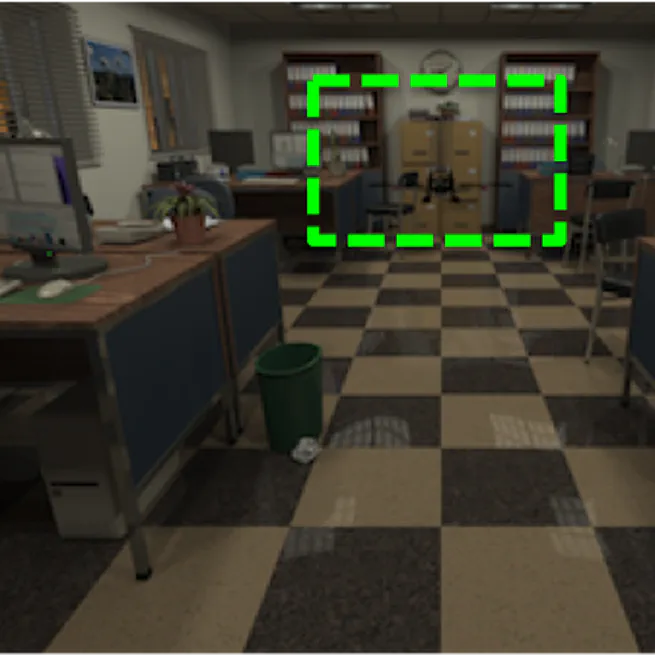
A 6-degree-of-freedom (6-DoF) pose localization method for a monocular camera in a 3D point-cloud dense map prebuilt by an RGB-D sensor.
A 6-degree-of-freedom (6-DoF) pose localization method for a monocular camera in a 3D point-cloud dense map prebuilt by an RGB-D sensor.
Dec 12, 2013
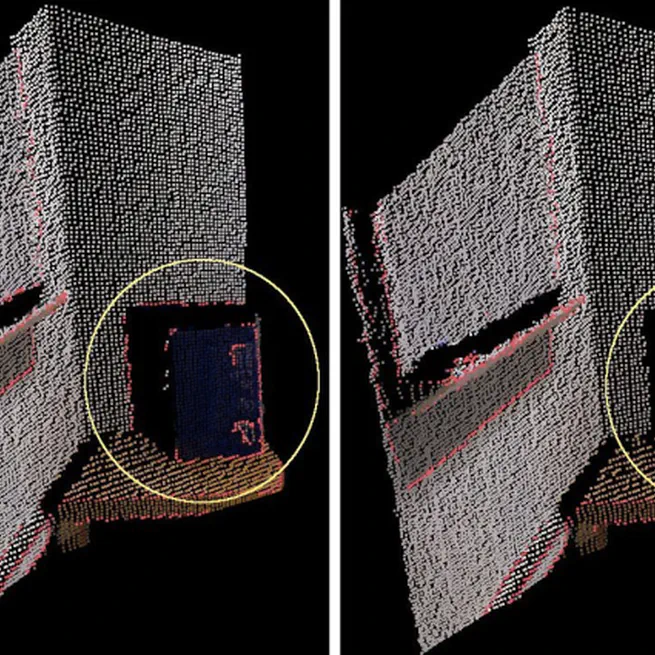
Incremental Registration of RGB-D Images
We present a real-time technique for 6-DoF camera pose estimation through the incremental registration of RGB-D images.
May 14, 2012