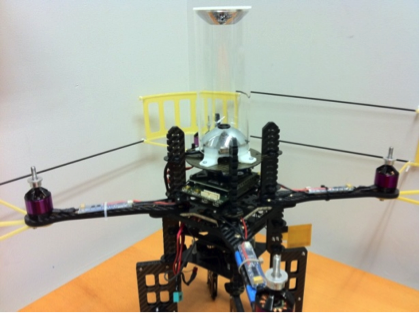
 Single-camera Catadioptric Omnistereo Sensor (60-mm diameter) mounted on a Pelican UAV
Single-camera Catadioptric Omnistereo Sensor (60-mm diameter) mounted on a Pelican UAV
Abstract
The limited payload and on-board computation constraints of Micro Aerial Vehicles (MAVs) make sensor configuration very challenging for autonomous navigation and 3D mapping. This paper introduces a catadioptric single-camera omni-stereo vision system that uses a pair of custom-designed mirrors (in a folded configuration) satisfying the single view point (SVP) property. The system is compact and lightweight, has a wide baseline which allows fast 3D reconstruction based on stereo calculation. The algorithm for generating range panoramas is also introduced. The simulation and experimental study demonstrate that the system provides a good solution to the perception challenge of MAVs.
Carlos Jaramillo
Senior Autonomy Engineer
My research interests include mobile robotics, computer vision and machine learning.