Visual Odometry with a Single-Camera Stereo Omnidirectional System
A single-camera stereo omnidirectional system (SOS) is applied for estimating egomotion in real-world environments.
Oct 1, 2019
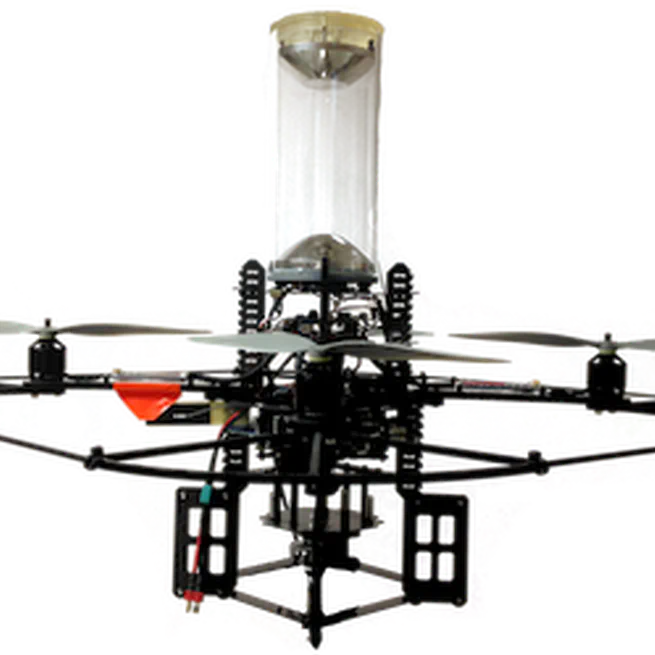
Design and Analysis of a Single-Camera Omnistereo Sensor for Quadrotor Micro Aerial Vehicles (MAVs)
We describe the design and 3D sensing performance of an omnidirectional stereo (omnistereo) vision system applied to Micro Aerial Vehicles (MAVs).
Feb 6, 2016

A Single-Camera Omni-Stereo Vision System for 3D Perception of Micro Aerial Vehicles (MAVs)
We introduce a catadioptric single-camera omnistereo vision system that uses a pair of custom-designed mirrors (in a folded configuration) satisfying the single view point (SVP) property as a good solution to the perception challenge of MAVs.
Jun 19, 2013