AscTec Pelican AUV with an ASUS Xtion Sensor
AscTec Pelican AUV with an ASUS Xtion Sensor
Abstract
In this paper we present a navigation system for Micro Aerial Vehicles (MAV) based on information provided by a visual odometry algorithm processing data from an RGB-D camera. The visual odometry algorithm uses an uncertainty analysis of the depth information to align newly observed features against a global sparse model of previously detected 3D features. The visual odometry provides updates at roughly 30 Hz that is fused at 1 KHz with the inertial sensor data through a Kalman Filter. The high-rate pose estimation is used as feedback for the controller, enabling autonomous flight. We developed a 4DOF path planner and implemented a real-time 3D SLAM where all the system runs on-board. The experimental results and live video demonstrates the autonomous flight and 3D SLAM capabilities of the quadrotor with our system.
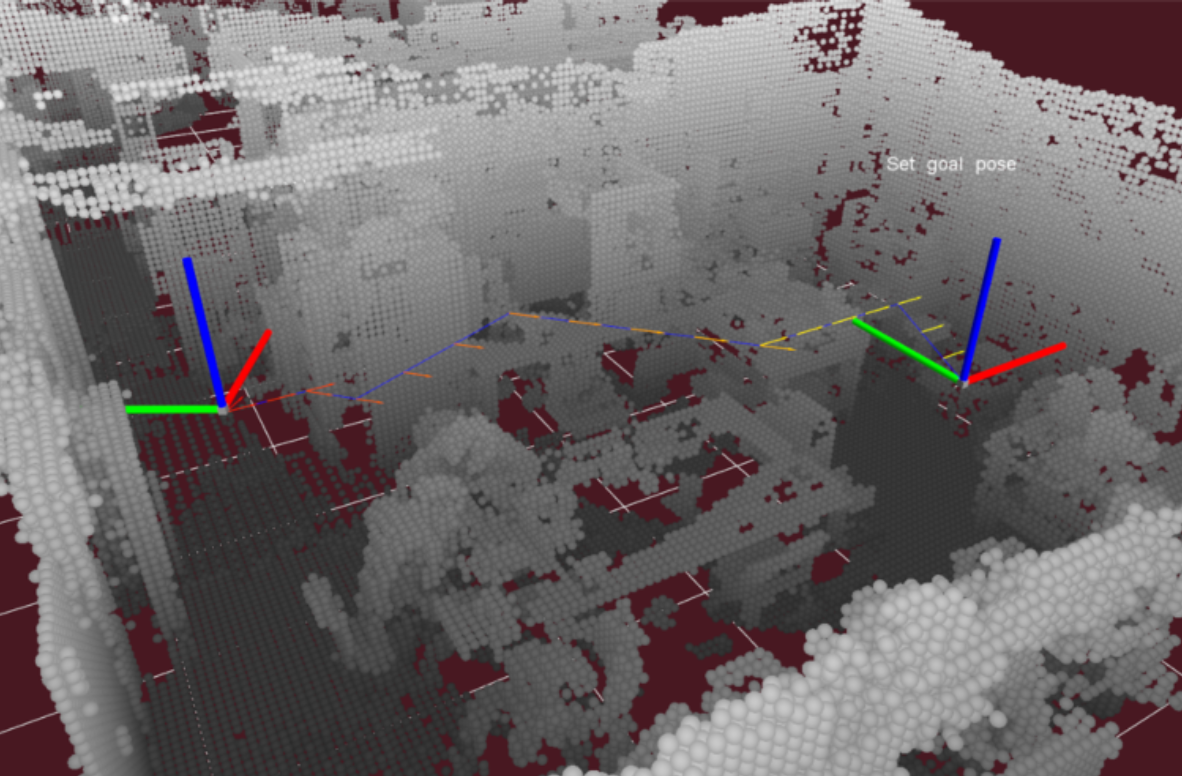
Four-dimensional path (blue) in a cluttered indoor environment (map) built online with the visual odometry algorithm using the RGB-D sensor.