
Autonomous Quadrotor Flight Using Onboard RGB-D Visual Odometry
We present an on-board navigation system for Micro Aerial Vehicles (MAV) based on information provided by a visual odometry algorithm processing data from an RGB-D camera.
May 31, 2014
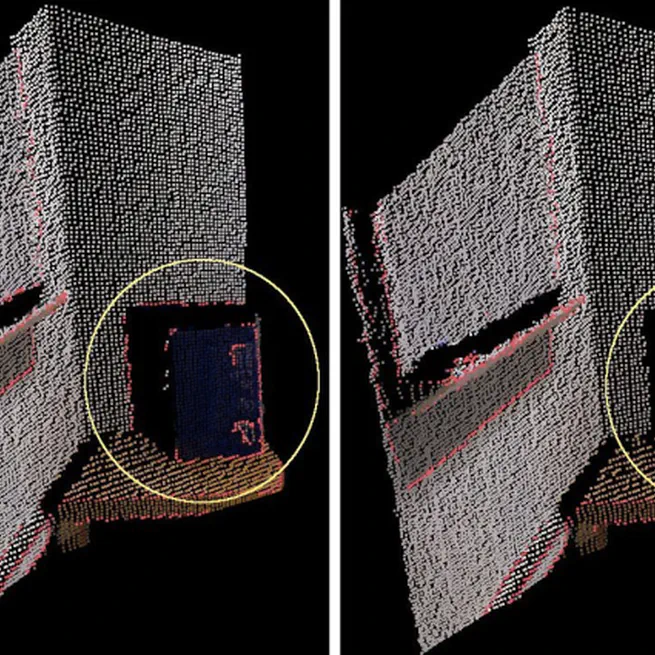
Incremental Registration of RGB-D Images
We present a real-time technique for 6-DoF camera pose estimation through the incremental registration of RGB-D images.
May 14, 2012

CATA
In 2011, a new intelligent ground vehicle CATA (City Autonomous Transportation Agent) was rebuilt to employ the ROS framework to participate in IGVC.
Jun 4, 2011

CityALIEN
In 2010, our intelligent ground vehicle CityALIEN participated and won the IGVC Design Challenge.
Jun 4, 2010
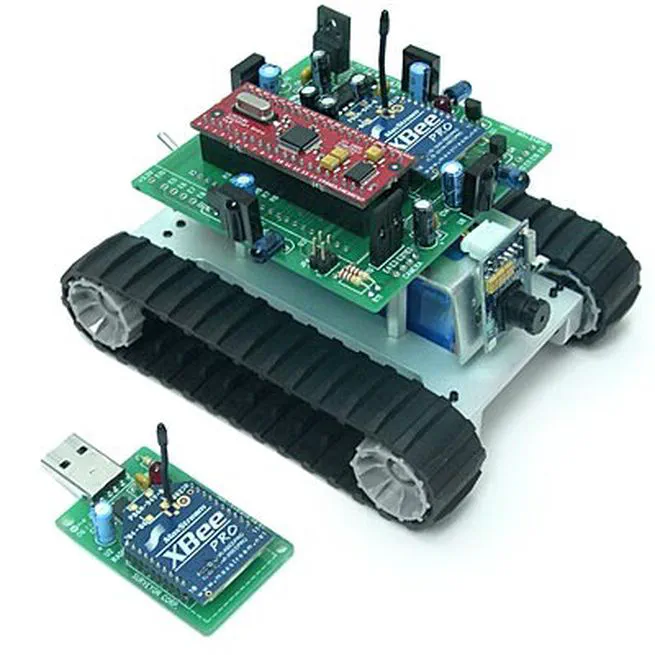
Surveyor SRV-1 Driver and GUI Remote Control
As part of my Research Experience for Undergraduates, I developed a Player/Stage driver and remote controller for the mobile robot.
Sep 1, 2009